


































#4.5.1.1.2.1 – D’accord. Comme vous avez été en mesure d’engager …
D’accord. Comme vous avez été en mesure d’engager le mode de chargement automatique précédemment, l’erreur n’est probablement pas liée à la pince elle-même.
Si vous chargiez une balle, et que le bras s’arrête au-dessus de la table de chargement et puis l’erreur s’est manifestée, il n’y a que 2 raisons potentielles pour cela:
1- Votre capteur d’angle de bras de chargement n’est pas calibré. Par conséquent, le bras de chargement essaie d’atteindre par exemple la position de 90 degrés, mais le capteur retourne la valeur de 88 degrés de sorte que vous ne pouvez pas sauter à l’étape suivante. Reportez-vous au protocole A-STA-015 pour apprendre à effectuer l’étalonnage des bras de chargement.
2- Si après avoir calibré votre bras de chargement le problème reste, alors il ya une dernière raison pour cela. Le capteur qui détecte la présence des balles sur la plate-forme de chargement (Capteur LS_BA_SL) est soit défectueux ou hors de réglage et le bras de chargement a saisie la balle trop basse, donc quand il le retourne à l’envers sur la table de chargement, la balle touche la plate-forme de chargement, et parce que le capteur de présence de balle est défectueux, il ne libérera pas la pression des pinces contre la balle. Du coup, le bras n’est pas capable d’atteindre l’angle désirés pour pouvoir passer à la prochaine étape, soit relâcher la pression sur la balle, puis redescendre le bras au niveau du sol.
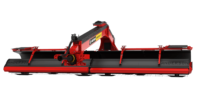
3- Inspectez le capteur LS_BA_SL. Cliquez sur la photo ci-dessous pour localiser le capteur

Référez-vous au protocol A-STA-007 qui vous explique comment valider le bon fonctionnement du capteur de proximité.
4- Veuillez ajuster la hauteur de saisie des balles de votre bras de chargement en fonction de la dimension de vos balles
D’accord. Comme vous avez été en mesure d’engager le mode de chargement automatique précédemment, l’erreur n’est probablement pas liée à la pince elle-même.
Si vous chargiez une balle, et que le bras s’arrête au-dessus de la table de chargement et puis l’erreur s’est manifestée, il n’y a que 2 raisons potentielles pour cela:
1- Votre capteur d’angle de bras de chargement n’est pas calibré. Par conséquent, le bras de chargement essaie d’atteindre par exemple la position de 90 degrés, mais le capteur retourne la valeur de 88 degrés de sorte que vous ne pouvez pas sauter à l’étape suivante. Reportez-vous au protocole A-STA-015 pour apprendre à effectuer l’étalonnage des bras de chargement.
2- Si après avoir calibré votre bras de chargement le problème reste, alors il ya une dernière raison pour cela. Le capteur qui détecte la présence des balles sur la plate-forme de chargement (Capteur LS_BA_SL) est soit défectueux ou hors de réglage et le bras de chargement a saisie la balle trop basse, donc quand il le retourne à l’envers sur la table de chargement, la balle touche la plate-forme de chargement, et parce que le capteur de présence de balle est défectueux, il ne libérera pas la pression des pinces contre la balle. Du coup, le bras n’est pas capable d’atteindre l’angle désirés pour pouvoir passer à la prochaine étape, soit relâcher la pression sur la balle, puis redescendre le bras au niveau du sol.
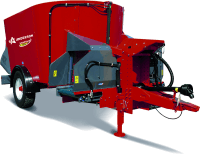
3- Inspectez le capteur LS_BA_SL. Cliquez sur la photo ci-dessous pour localiser le capteur
Référez-vous au protocol A-STA-007 qui vous explique comment valider le bon fonctionnement du capteur de proximité.
4- Veuillez ajuster la hauteur de saisie des balles de votre bras de chargement en fonction de la dimension de vos balles